

Hitting The Battery Wall
Humanoid robots demand more from a battery than any device ever built.Can current-day battery chemistry keep up with humanoid ambition?


A warehouse humanoid picks up a 15 kg box, carries it 30m, shelves it, and walks back. But inside the battery pack, nothing about this is routine. Each cycle contains a 2,500W lift spike, a 600 to 1,000W loaded walk, one or two 3,000W balance-recovery transients when something unexpected appears in the path, and a gentler unloaded return. Over a single charge, the battery absorbs 200 to 400 high-power spikes that are violent, asymmetric, thermally punishing.
No other battery-powered device on earth operates like this. An EV cruises at steady draw and charges slowly overnight. A phone pulls a few watts for hours. A power tool spikes hard but for seconds at a time. A humanoid robot does something no commercial lithium-ion cell was designed for: sustained high discharge punctuated by repeated transients, hundreds of times per charge cycle, inside a compact torso where heat from 40+ actuators has nowhere to go. The closest analogue isn’t a car or a laptop. It’s closer to an aircraft auxiliary power unit, except that it is expected to run all day, every day, and the business model depends on it lasting for years.
Most humanoid deployment models use manufacturer-rated battery specs: 800–1,500 cycles to 80% capacity. But these numbers come from controlled lab conditions, i.e. 1C discharge, 25°C, gentle charging protocols. Under actual warehouse conditions like high C-rate discharge, fast charging, deep cycling, elevated temperatures, cycle life falls to 200–500.
A robot running two shifts a day burns through roughly 500 cycles a year. At the lab number, its battery lasts about two years. At the real-world number, six months. That’s a pretty big gap between spec sheet and shop floor.
From Wheeled to Bipedal
Not all robots face the same battery challenge, and understanding the gradient makes the humanoid case clearer.
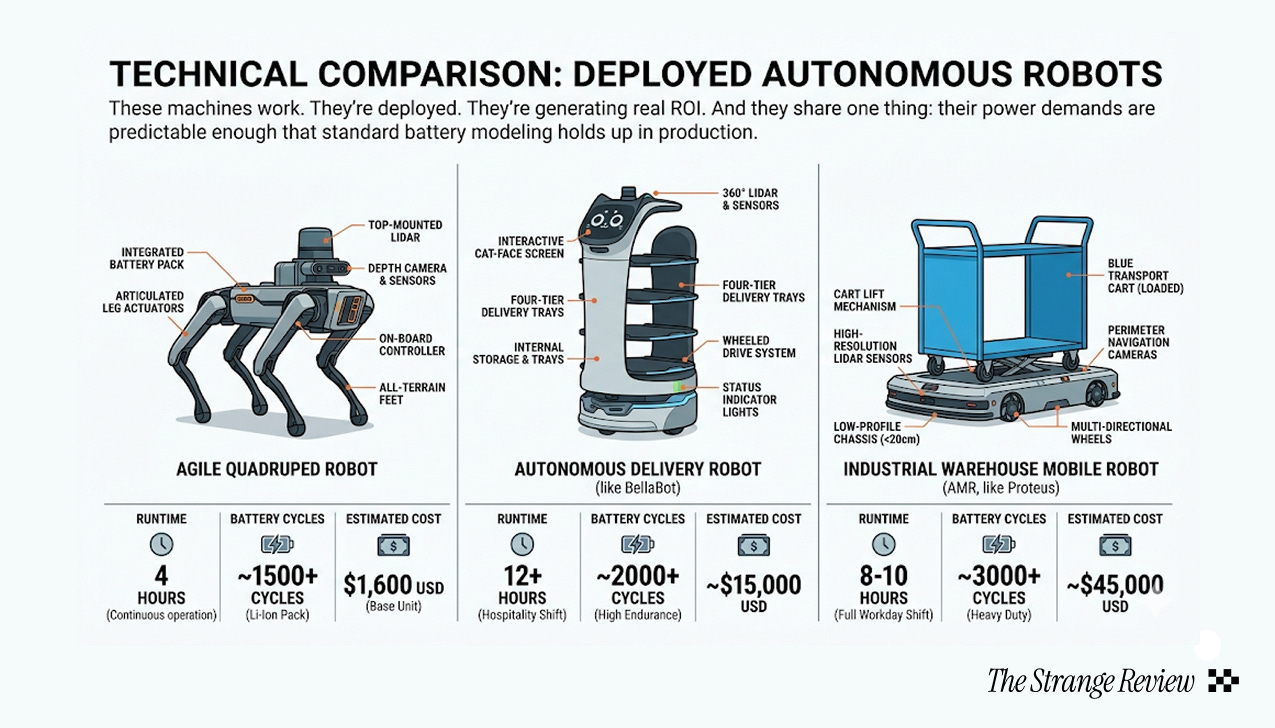
Unitree’s Go2 quadruped runs 4 hours on a charge and costs $1,600. BellaBot navigates dining rooms across 12-hour shifts. Amazon’s Proteus moves shelving pods for a full workday without intervention. These machines work. They’re deployed. They’re generating real ROI. And they share one thing: their power demands are predictable enough that standard battery modeling holds up in production.
A wheeled AMR like Proteus operates on a flat floor, rarely changes speed aggressively, and carries a large flat battery pack with room for active thermal management. Power draw is steady. Battery packs routinely hit 1,500–2,000 cycles under these conditions, roughly what manufacturers promise.

Quadrupeds are more demanding. Dynamic gaits, varied terrain, and postural stabilization introduce variable power spikes. But four-legged platforms distribute load more efficiently than bipeds, don’t fight gravity the same way, and aren’t typically asked to run eight-hour industrial shifts. Real-world cycle life drops, but the deployment context absorbs it.
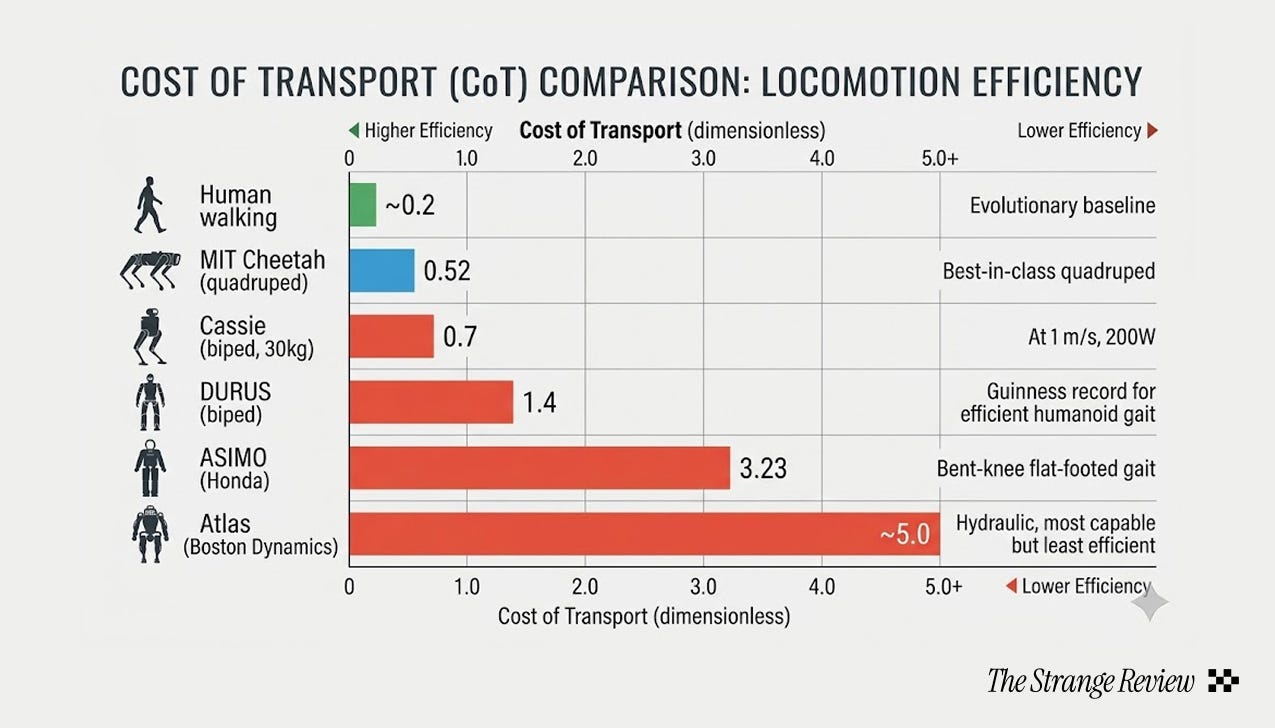
Then there’s the humanoid. Bipedal locomotion is, from a power standpoint, expensive in ways that are hard to engineer around quickly. The human body walks at a cost of transport (CoT) of about 0.2 (roughly 0.2 joules per kilogram per meter), the product of hundreds of millions of years of evolutionary refinement. Honda’s ASIMO clocked a CoT of 3.2: sixteen times less efficient. Agility Robotics’ Cassie, one of the more efficient bipeds tested in research settings, draws around 200W just to walk at 1 m/s, and Cassie weighs only 30 kg.
Scale this to a 60 kg production humanoid carrying a 10 kg payload and you’re looking at 400–800W continuous for flat-ground walking alone. This gap narrows with better control algorithms and mechanical design, and it will continue to narrow. But bipeds will always cost more energy than quadrupeds or wheels. Balancing on two legs is inherently expensive.
Actuators are the primary power consumer, and humanoids have a lot of them. According to Interact Analysis, actuators account for more than 30% of a humanoid’s total bill of materials. Tesla’s Optimus has 40+ actuators, each drawing power not just when moving but when holding position against gravity. The knee and hip actuators are continuously working just to keep the robot upright, unlike a human, whose skeletal structure can passively lock joints. Optimus Gen 3’s hands alone have 25 actuators per forearm, each requiring power and generating heat.
The result: even the most capable modern humanoids top out at 4 to 5 hours of real-world active runtime on a fresh battery.
Bain’s 2025 report put it plainly:
most humanoids today operate for about two hours under real load, and a full eight-hour shift without recharging could take up to 10 years.
Regenerative braking (recovering energy during deceleration) gets cited frequently as an offset. Some estimates claim up to 30% energy reduction. In practice, for bipedal robots, that number is generous. While EVs recover energy from sustained highway deceleration, Humanoid robots decelerate in micro-bursts: the swing phase of each step, brief postural corrections, stops between tasks. In realistic testing, gains are closer to just 10–15%. That’s nice to have, of course, but not a structural solution.
Going Under the Hood: Chemistry and Its Limits
All lithium-ion batteries work the same way at a basic level: lithium ions shuttle between two electrodes through an electrolyte. Charge pushes them one direction, discharge pushes them back. Every cycle leaves damage. How fast that damage accumulates, and what ultimately kills the cell, depends on which battery chemistry the manufacturer chose.
There are three commercially mature lithium-ion architectures competing for the humanoid market. And there is a fourth architecture, not yet commercial, that the industry is banking on.
First, how batteries degrade
Two degradation mechanisms matter most for humanoid applications.
The first is SEI growth. A thin film called the solid electrolyte interphase forms on the anode surface during the first charge. It stabilizes the electrode, but it never stops thickening. Each cycle adds to it, consuming active lithium and raising internal resistance. At 25°C and moderate discharge, this process is slow and predictable, which is why lab-rated cycle counts look favorable. At elevated temperatures and heavy current draw, it accelerates significantly. This is the primary driver of gradual capacity fade.
The second is lithium plating. When current is pushed into the anode faster than the graphite can absorb it (e.g. during fast charging, or at low temperatures) metallic lithium deposits directly on the surface instead of intercalating into the crystal structure. That lithium is permanently lost. In severe cases it forms dendrites that can puncture the separator. Research published in Batteries found that at −5°C and 3C charging, lithium plating caused 17% capacity loss after just 50 cycles, versus 6% at 1C under the same conditions.
These mechanisms compound rather than add. High temperature accelerates SEI growth, which raises resistance, which generates more heat. Fast charging causes plating, which creates localized hotspots, which accelerates SEI growth in those regions, making the next fast charge more damaging. At 4C and 5C discharge rates, i.e. the range humanoids operate in during balance-recovery transients, electrode structure decay accelerates measurably. Cells can fade gradually for months, then drop sharply when accumulated damage crosses a threshold. The nonlinearity is where deployment models break.
And the thermal environment inside a humanoid makes all of this worse. In an EV, active thermal management keeps cells at 35–40°C. In a humanoid torso, with batteries packed among heat-generating actuators with far less space for cooling, internal cell temperatures can spike to 80–100°C during peaks. J. Moyer, an EV battery engineer we spoke with, noted that this difference alone may explain why automotive packs achieve an order of magnitude more cycles than early humanoid deployments. Every 10°C above 25°C roughly doubles the rate of parasitic side reactions.
The material tradeoffs
Each lithium-ion architecture handles these failure modes differently.
NMC (Nickel Manganese Cobalt) is the default for most humanoid platforms. It has the highest energy density of commercially mature chemistries, which translates directly to runtime per kilogram of pack weight. The tradeoff: NMC is the most sensitive to everything that matters in a humanoid deployment, like high temperatures, deep discharges, fast charging. Lab-rated cycle life runs 800–1,500. Under real humanoid conditions, that falls to 200–500. Lab data from IOP Science confirms the pattern: NMC cells retain roughly 9% less capacity than LFP at the same cycle count. R. Osipov, an LG EV battery engineer we spoke with, confirmed that 3–5C discharge is “quite aggressive” compared to typical automotive applications.
LFP (Lithium Iron Phosphate) is the durable alternative. It’s cheaper, thermally stable, and tolerant of abusive cycling. Cycle life: 2,000–4,000 under standard conditions. But LFP packs weigh 20–30% more for the same capacity. For a humanoid, that weight penalty either cuts runtime or forces actuators to work harder, partially offsetting the longevity gain. LFP also loses significant capacity below 0°C, limiting cold-storage or outdoor deployments. For a climate-controlled warehouse, it’s a credible choice. For a general-purpose platform, this is harder to justify.
LTO (Lithium Titanate) is nearly indestructible, with cycle life exceeding 10,000 under some conditions, and excellent tolerance for fast charging and high discharge. The problem is energy density: roughly half that of NMC. A humanoid on LTO needs a pack twice as large for the same operating window, or accepts runtimes around an hour. Practical only for narrow applications with short duty cycles (inspection, surgical environments) not general warehouse work.
Solid-state replaces the liquid electrolyte entirely with a solid one. This is a genuinely different architecture, not an incremental improvement, and it theoretically unlocks higher energy density, better cycle life, and improved safety simultaneously. Toyota is targeting commercial deployment in vehicles by 2027–2028. QuantumScape expects initial mass production around the same window. BYD plans vehicle installation by 2027 and large-scale production by 2030. But these are automotive timelines, i.e. large-format cells for EVs. Humanoid-specific form factors are 2029 to 2030 at earliest, on a schedule that has already slipped. And there’s an open question about whether solid electrolytes can handle the repeated high-C-rate pulses a humanoid demands. Solid-state may solve the energy density constraint while leaving the power density problem intact.
T. Lai, a battery engineer we interviewed, put it plainly: “It mostly depends on the battery chemistry. Some will hold up very well, some won’t, but all chemistries involve tradeoffs.” On the NMC question specifically: doing 3–5C regularly “does a lot of degradation.” But he pointed toward what good engineering looks like: “Someone could design around it, whether by oversizing a battery or using a better cell chemistry for high C-rates and just minimizing active run time.” You get a sense of the tradeoffs humanoid designers actually face.
The Economics of Getting This Right
The standard deployment model for a 100-robot warehouse fleet assumes battery replacement every 12–18 months at roughly $1,100 per unit. Under realistic degradation, replacement frequency jumps to every 3 to 5 months. Each robot needs 8 to 9 batteries over five years instead of 3 to 4. Total battery costs roughly double.
But the bigger number is downtime. A non-hot-swappable battery swap takes 4 to 6 hours: diagnosis, cooldown, disassembly, replacement, recalibration. For a 100-robot fleet cycling through replacements on a compressed schedule, that’s 1,000 to 2,400 hours of lost productive time per year. At $200/hour opportunity cost, the difference between a 6-hour manual swap and a 3-minute autonomous swap is roughly $300K per year for a fleet that size.
This is a hefty cost surprise. Operators who budgeted for one replacement schedule discover they’re on another.
There are really only two responses to the battery problem: swap faster, or store more. The companies making progress have picked one and designed the entire system around it.
Software helps at the margins. Better BMS algorithms and conservative charging protocols contribute 20–30% cycle life improvement. Thermal management adds 15–20%. Software optimization gets another 25–35%. Combined best case: roughly 2×, from 200 cycles to 400. But closing the gap to EV-grade longevity requires closer to 5×. The remaining distance is an architecture problem, not a software one. Which is why the interesting moves are structural.
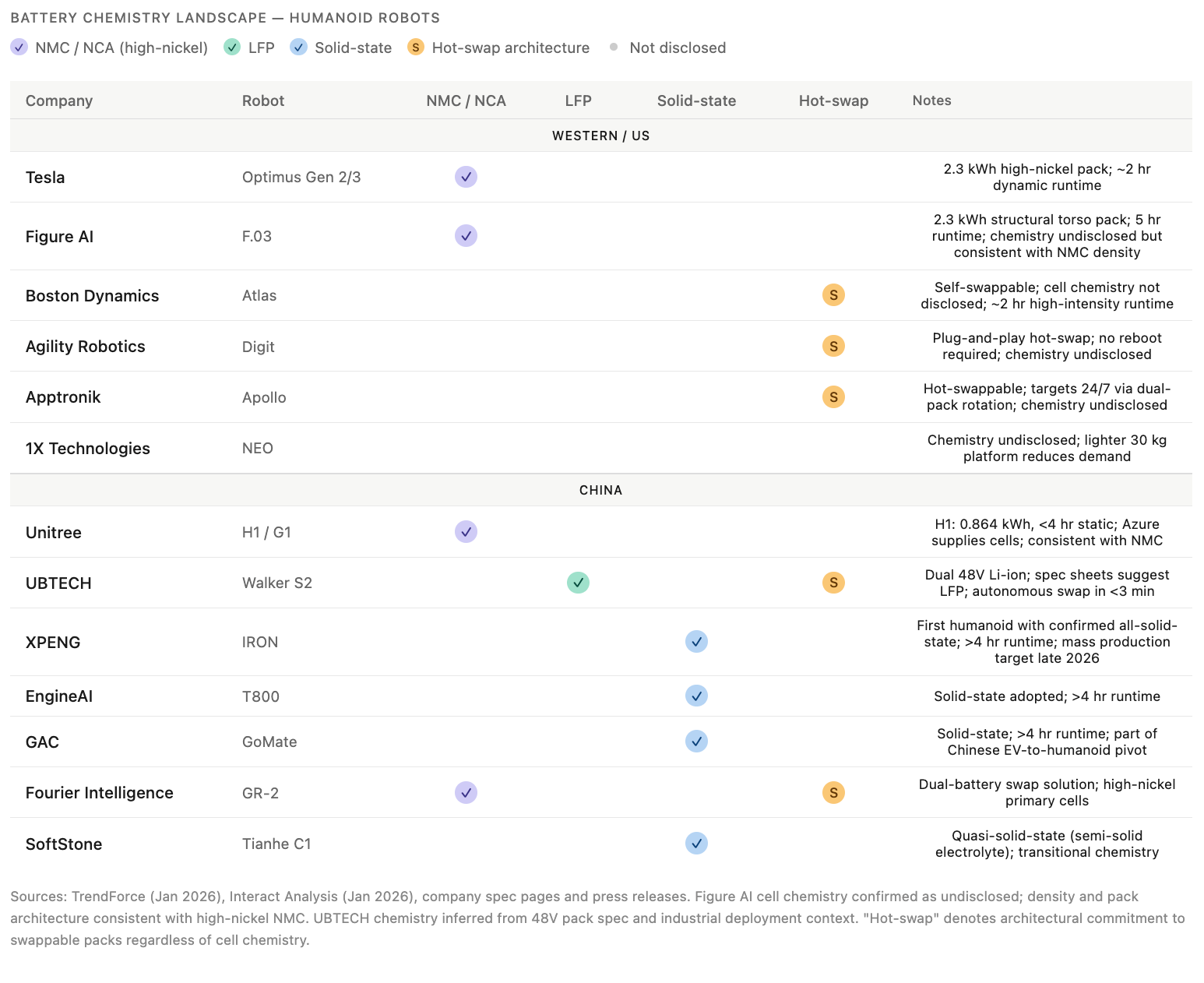
Swap faster. UBTECH’s Walker S2 is the clearest example. Rather than building a better battery, UBTECH made the battery disposable and engineered the swap. Walker S2 uses a dual-battery system: when one pack nears depletion, the robot navigates autonomously to a charging pod, removes the depleted battery, docks it, and installs a fresh module in under three minutes. No shutdown, no human intervention. A backup battery maintains continuity throughout. Compare 3-minute swaps to 90-minute charging sessions and the math changes completely. A factory running three shifts goes from losing hours of productive capacity per day to losing minutes.
Walker S2 is in mass production and deployed on automotive assembly lines across China. Its parent company UBTECH announced over $112 million in confirmed orders by November 2025, with deployments running at Nio, BYD, Zeekr, and Foxconn. Boston Dynamics made the same bet: the new Atlas was built with self-swappable batteries as a core design decision, not a retrofit.
Store more. Figure took the opposite approach with its F.03 battery. Rather than solving swap speed, Figure embedded the battery as a load-bearing component of the torso. This recovers weight and volume that would otherwise be wasted on a separate enclosure, pushing the F.03 to 2.3 kWh and 5 hours of runtime,with a 94% increase in energy density over previous generations. Active cooling is integrated into the die casting. This doesn’t fix cycle life directly, but every percentage point of energy density you gain extends the window before degradation forces a replacement. Figure 02 logged over 1,250 operational hours at BMW Spartanburg, including a 20-hour continuous shift. Agility’s Digit takes a softer version of the same path. Autonomous docking for between-task charging, battery life extended to 4 hours, a 2-to-1 work-to-charge ratio targeting 4-to-1 and eventually 10-to-1.
The gap between 800 cycles and 200 cycles is not a rounding error. It’s the difference between a battery that lasts months instead of years.
While solid-state batteries may eventually change this calculus (when it gets here?).
Until then, the robots shipping into warehouses today run on the chemistry we have, and the engineering has to be good enough to make that work.
The authors spoke with battery engineers from LG, EV OEM suppliers, and independent research settings. All opinions are the authors’ own.
Sources: Bain & Company Technology Report 2025, Goldman Sachs humanoid robotics research (2024–2025), IEEE Spectrum (October 2025), IOP Science, Journal of Power Sources, Batteries (MDPI), Figure AI, Agility Robotics, UBTECH Robotics, company filings and press releases.
Joy Yang is a Strange Research Fellow. She is pursuing computer science and government at Oxford, and is a researcher with its Visual Geometry Group. She was previously an intern with OpenAI and Google.
Mason Rodriguez Rand is a Strange Research Fellow who holds degrees in molecular and mechanical engineering (UChicago, UC Berkeley) and has led engineering and go-to-market efforts at climate and energy startups out of Argonne National Lab and UC Berkeley, spanning nuclear, carbon removal, and advanced materials.
 | A guest post by
|
 | A guest post by
|